Typische dynamische Verbindungen automatischer Steuerungssysteme. Typische selbstfahrende Geschützeinheiten
In der ersten Phase des ACS-Designs werden Probleme der Systemsynthese auf der Grundlage von Daten zum Zweck des Systems und den Designmerkmalen des Kontrollobjekts gelöst. Bei der Bildung der ACS-Struktur kommen in dieser Phase funktionsnotwendige Systemelemente zum Einsatz, die sogenannten ACS-Links (Wertgeber, Signalwandler, Regler, Aktoren etc.).
Die zweite Phase des ACS-Entwurfs ist eine Analyse der Übereinstimmung der qualitativen Merkmale des entworfenen Systems mit den erforderlichen. Um alle Arten der ACS-Analyse durchzuführen, die in besprochen werden Abschnitt 3 ist es notwendig, dass das Modell in Form einer Differentialgleichung vom Typ (1) oder einer Übertragungsfunktion vom Typ (2) vorliegt.
Um Modelle von selbstfahrenden Waffen zu erhalten, wird das Konzept eingeführt typische Grundstufe. Unter einem typischen elementaren Glied versteht man eine Menge von Elementen eines automatischen Steuerungssystems, deren dynamische Prozesse durch eine lineare Differentialgleichung der Form (1) nicht höher als zweiter Ordnung beschrieben werden ( N 2 £). Durch die Einführung elementarer Einheiten ist es möglich, die gesamte Vielfalt technischer Geräte auf eine geringe Anzahl von Standardeinheiten zu reduzieren, was die Nutzung allgemeiner Analysemethoden für jedes ACS ermöglicht. Die Typen der Grundeinheiten von Selbstfahrlafetten sind in angegeben Anwendung 1.
Verstärkende, trägheitsfreie Verbindung
Verbindungen dieser Art umfassen jedes Element des automatischen Steuerungssystems, bei dem zu jedem Zeitpunkt eine proportionale Beziehung zwischen dem Ausgangswert besteht j(T) und Eingabeeinfluss X(T), d.h. Dieser Zusammenhang wird nicht nur in der Statik, sondern auch in der Dynamik durch eine algebraische Gleichung der Form beschrieben:
j(T) = k× X(T),
Wo k– statischer Konvertierungskoeffizient (Gewinn) des Links.
Streng genommen ist die verstärkende Verbindung seit der Änderung nicht dynamisch j(T) erfolgt sofort, unmittelbar nach der Änderung X(T). Sie sagen, dass die Differentialgleichung einen Link hat Null Befehl. Die Linkübertragungsfunktion hat die Form W(P) = k.
Wenn dem Eingang ein einzelner Schritt zugeführt wird X(T) = 1(T) erhält der Ausgang sofort das gleiche Signal, verstärkt k(Abb. 35).
| Reis. 35 |
Es ist klar, dass kein echtes technisches Gerät den Eingabeeffekt sofort umwandeln kann. Allerdings ist die Geschwindigkeit einiger Elemente des ACS so hoch (die Dauer des Übergangsprozesses beträgt weniger als eine Sekunde), dass sie als Verbindungen dieser Art betrachtet werden können . Beispiele für solche Elemente sind ein Potentiometer, ein Hebel, ein elektronischer Verstärker. In erster Näherung, ohne Berücksichtigung des Phänomens der Verdrehung und des Spiels, kann ein Getriebe als verstärkende, trägheitsfreie Verbindung betrachtet werden.
In der Literatur gibt es andere Namen für die verstärkende trägheitsfreie Verbindung: Verstärker, idealer Verstärker oder proportional Verknüpfung
Aperiodischer Link erster Ordnung
Ein Link dieser Art (siehe Anwendung 1) wird durch eine Differentialgleichung erster Ordnung beschrieben:
 ,
,
Wo k– statischer Konvertierungskoeffizient (Gewinn) der Verbindung; T– eine Konstante mit der Dimension Zeit (Verbindungszeitkonstante).
In Abb. Abbildung 36 zeigt die transienten Eigenschaften aperiodischer Verbindungen erster Ordnung mit k= 10 und unterschiedliche Zeitkonstanten T. Es ist zu erkennen, dass mit zunehmender T Ausgabewert des Links j(T k, d.h. Zeitkonstante T charakterisiert Trägheit Verknüpfung und bestimmt den Zeitpunkt des Übergangsprozesses t p. In praktischen Berechnungen t p Für eine aperiodische Verbindung erster Ordnung werden die Werte mit ungefähr 3× angenommen T.
| Reis. 36 |
 .
.
Aperiodische Verbindungen erster Ordnung sind solche ACS-Geräte wie elektrische R.L.- Und R.C.-Schaltkreise (verwendet als Korrekturgeräte für automatische Steuerungssysteme), ein elektrischer Gleichstromgenerator (verwendet als Steuergerät für automatische Steuerungssysteme), ein Temperatursensor - Thermoelement, ein Durchflussbehälter mit Flüssigkeit oder Gas (Steuerungsobjekte in chemisch-technologischen automatischen Systemen). Steuerungssysteme) und vieles mehr.
Lassen Sie uns ein Dynamikmodell erstellen R.C.-Schaltung auf theoretische Weise: Wir schreiben die Gleichungen der Eingangs- und Ausgangsschaltungen (Abb. 37) nach dem Kirchhoffschen Gesetz:
| Reis. 37 |
Du bist dabei(T) und freier Tag - Du bist raus(T) Variablen R.C. ich(T
 ,
,
ich(T) in die Eingangsschaltungsgleichung:
 .
.
Die resultierende Gleichung entspricht der Differentialgleichung der aperiodischen Verbindung erster Ordnung, für die die Zeitkonstante gilt T = R× C, d.h. bestimmt durch die Werte des verwendeten Widerstands und Kondensators R.C.-Kontur; k = 1; j(T) = Du bist raus(T); X(T) = Du bist dabei(T).
In der Literatur gibt es andere Namen für den aperiodischen Link erster Ordnung: Trägheitsverbindung erster Ordnung oder Entspannung Verknüpfung
4.3. Aperiodische Verbindung zweiter Ordnung und oszillierend
nachhaltig
Die aperiodische Verbindung zweiter Ordnung und die schwingungsstabile Verbindung haben die allgemeine Form einer Differentialgleichung (siehe. Anwendung 1):
 ,
,
Aber aperiodische zweite Ordnung eine Verbindung mit einer solchen Gleichung heißt Subjekt  , A oszillierend- angesichts dessen
, A oszillierend- angesichts dessen  .
.
Gesamtansicht der Übertragungsfunktion für beide Links:
 .
.
Beachten Sie, dass bereitgestellt  Die gleichung
Die gleichung  wird eine positive Diskriminante und dementsprechend echte Wurzeln haben. Dies ermöglicht uns, den Nenner der Übertragungsfunktion der aperiodischen Verbindung zweiter Ordnung in Faktoren der Form zu zerlegen:
wird eine positive Diskriminante und dementsprechend echte Wurzeln haben. Dies ermöglicht uns, den Nenner der Übertragungsfunktion der aperiodischen Verbindung zweiter Ordnung in Faktoren der Form zu zerlegen:

Wo  .
.
Wenn wir berücksichtigen, dass sich bei der Reihenschaltung von Verbindungen ihre Übertragungsfunktionen vervielfachen, stellt sich heraus, dass eine aperiodische Verbindung zweiter Ordnung zwei hintereinander geschalteten aperiodischen Verbindungen erster Ordnung mit einer gemeinsamen statischen Umwandlung entspricht Koeffizient k und Zeitkonstanten T 3 und T 4 .
In Abb. Abbildung 38 zeigt die transienten Eigenschaften von zwei aperiodischen Verbindungen zweiter Ordnung mit k= 5 und unterschiedliche Zeitkonstanten T 1 und T 2. Es ist zu erkennen, dass mit zunehmender T 1 und T 2 Ausgabewert des Links j(T) erreicht langsamer einen stationären Wert gleich k, d.h. Zeitkonstanten und bestimmen für diese Verknüpfung den Zeitpunkt des Übergangsprozesses.
Wichtig! Bitte beachten Sie: Trotz der visuellen Ähnlichkeit der Übergangseigenschaften der aperiodischen Verbindungen erster und zweiter Ordnung weisen sie grundlegende Unterschiede auf. Die Kennlinie 2. Ordnung hat einen Wendepunkt: zum Zeitpunkt Null die Änderungsrate j(T) minimal ist, steigt sie dann bis zum Wendepunkt an und nimmt danach ab. Der erste Abschnitt der Übergangseigenschaften von Links zweiter Ordnung (z T von 0 bis 0,5 Sekunden) ist in Abb. dargestellt. 38 im hervorgehobenen vergrößerten Fragment. Zum Vergleich ist dort auch ein ähnlicher Ausschnitt der Eigenschaften der in Abb. dargestellten Links erster Ordnung dargestellt. 36. Es ist ersichtlich, dass sich für sie die Geschwindigkeit ändert j(T) ist im Moment maximal T= 0. Weiter, während der Zeit t rÄnderungsrate j(T) sinkt auf Null (siehe Abb. 36).

Das Zeitintervall bis zum Wendepunkt der Übergangscharakteristik einer aperiodischen Verbindung zweiter Ordnung wird nach folgender Formel berechnet:
 .
.
Angesichts dessen , d.h. Für schwingungsstabil Link, Nenner der Übertragungsfunktion wird eine negative Diskriminante und dementsprechend komplex konjugierte Wurzeln haben. Aus der Theorie der Differentialgleichungen ist bekannt, dass die freie Bewegung eines solchen Systems harmonische Komponenten (Sinus, Cosinus) enthält, die bei Änderungen des Eingangssignals zu Schwankungen im Ausgangswert führen.
Die Übertragungsfunktion der oszillierenden Verbindung wird üblicherweise in der Form geschrieben:

Wo T– Zeitkonstante der Schwingungsverbindung; x – Dämpfungskoeffizient (für schwingungsstabile Verbindung 0< x < 1). Чем больше x, тем быстрее затухают колебания переходной характеристики звена. При x = 0 получается oszillierende Harmonische eine Verbindung, die am Ausgang ungedämpfte Schwingungen liefert (vgl. Anwendung 1). Für x ³ 1 haben wir eine aperiodische Verknüpfung zweiter Ordnung.
In Abb. In Abb. 39 zeigt die Übergangseigenschaften von zwei Schwingverbindungen mit identisch k= 8 und Zeitkonstante T= 1, und anders Dämpfungskoeffizienten x. Es ist zu erkennen, dass die Schwankung der Einschwingeigenschaften und Überschwinger der Verbindung mit x = 0,25 größer ist als die der Verbindung mit x = 0,5.
In Abb. In Abb. 40 zeigt die Übergangseigenschaften von zwei Schwingverbindungen mit identisch Werte des statischen Umrechnungskoeffizienten k= 8 und Dämpfungskoeffizient x = 0,3, und anders Zeitkonstantenwerte T. Es ist ersichtlich, dass die Zeit des Übergangsprozesses an der Verbindung mit T= 2 mehr als Link c T = 1.
| Reis. 39 |
| Reis. 40 |
Oszillatorische oder aperiodische Verbindungen zweiter Ordnung (abhängig von den Werten der technischen Eigenschaften, die das Verhältnis der Zeitkonstanten bestimmen T 1 und T 2) sind ACS-Geräte wie elektrische RLC-Schaltkreis; Gleichstrommotor (siehe Dynamikmodell-Ausgabe in Abschnitt 2.3.1), elastische mechanische Getriebe, beispielsweise zur Übertragung von Drehbewegungen mit Elastizität, Trägheitsmoment und Reibungskoeffizient, Differenzdruckmessgerät (Sensor zur Messung des Differenzdrucks) und andere Geräte.
Lassen Sie uns ein Dynamikmodell erstellen RLC-Schaltung auf theoretische Weise: Wir schreiben die Gleichungen der Eingangs- und Ausgangsschaltungen (Abb. 41) nach dem Kirchhoffschen Gesetz:
| Reis. 41 |
Der Zweck der Simulation besteht darin, eine Differentialgleichung der Form (1) zu erhalten, die den Eingang verbindet – Du bist dabei(T) und freier Tag - Du bist raus(T) Variablen R.C.-Kontur. Dazu müssen Sie die interne Zwischenvariable des Stromkreises – den Strom – in den Gleichungen der Eingangs- und Ausgangskreise entfernen ich(T). Differenzieren wir die Gleichung des Ausgangskreises:
,
und ersetzen Sie das Ergebnis des Ausdrucks ich(T) in die Eingangsschaltungsgleichung:
T 1 = R× C Und  , d.h. bestimmt durch die Werte des verwendeten Widerstands, Kondensators und Induktors RLC-Kontur; k = 1; j(T) = Du bist raus(T); X(T) = Du bist dabei(T). Die konkrete Art der Verknüpfung – aperiodisch zweiter Ordnung oder oszillierend – hängt vom Verhältnis der Zeitkonstanten ab T 1 und T 2 (oder bzw.), d.h. letztlich durch die Konfessionen bestimmt R, L Und C. Beispiele für transiente Eigenschaften RLC-Konturen sind in Abb. dargestellt. 42.
, d.h. bestimmt durch die Werte des verwendeten Widerstands, Kondensators und Induktors RLC-Kontur; k = 1; j(T) = Du bist raus(T); X(T) = Du bist dabei(T). Die konkrete Art der Verknüpfung – aperiodisch zweiter Ordnung oder oszillierend – hängt vom Verhältnis der Zeitkonstanten ab T 1 und T 2 (oder bzw.), d.h. letztlich durch die Konfessionen bestimmt R, L Und C. Beispiele für transiente Eigenschaften RLC-Konturen sind in Abb. dargestellt. 42.
| Reis. 42 |
Wir erhalten ein Modell der Dynamik eines mechanischen Systems mit linearer Bewegung, dessen Parameter mechanische Elemente Masse, Dämpfung (Reibung) und Elastizität sind (Abb. 43). Beachten Sie, dass im betrachteten System eine Bewegung nur in eine Richtung erfolgt; eine Bewegung in Querrichtung ist nicht zulässig.
Betrachten Sie die Wirkung einer äußeren Kraft F(T) separat auf isolierte mechanische Elemente übertragen. Für die Masse M nach Newtons zweitem Gesetz:
 ,
,
Wo v(T) - Geschwindigkeit; A(T) ist Beschleunigung und S(T) – lineare Bewegung ausgeben (siehe Abb. 43).
Bewegungsgeschwindigkeit des Dämpferkolbens unter Krafteinwirkung F(T) ist wie folgt definiert:
 ,
,
Wo G– Widerstandskoeffizient (Dämpfungskoeffizient).
| Reis. 43 |
Für eine elastische Feder hat die Bewegungsgleichung gemäß dem Hookeschen Gesetz die Form:
 ,
,
Wo H– Federelastizitätskoeffizient.
Im Gesamtsystem (siehe Abb. 43) pro Massekörper M Es wirken drei Kräfte – äußere Kraft F(T), Reibungskraft und elastische Kraft, daher gilt für die Summe der Kräfte:

Die resultierende Dynamikgleichung ist jedoch von zweiter Ordnung, um sie jedoch in die Form einer Standarddifferentialgleichung eines oszillierenden oder aperiodischen Elements zweiter Ordnung zu bringen (siehe. Anwendung 1) konstanter Koeffizient des Termes S(T) auf der linken Seite sollte gleich 1 sein. Lassen Sie uns die Dynamikgleichung auf eine Standardform reduzieren, indem wir die linke und rechte Seite durch den Federelastizitätskoeffizienten dividieren H:

Die resultierende Gleichung entspricht einer Differentialgleichung, für die die Zeitkonstanten gelten T 1 = G/ H Und  , d.h. bestimmt durch Masse, sowie Mengen G Und H; k = 1 / N; j(T) = S(T); X(T) = F(T).
, d.h. bestimmt durch Masse, sowie Mengen G Und H; k = 1 / N; j(T) = S(T); X(T) = F(T).
Damit haben wir gezeigt, dass ein mechanisches System der in Abb. 43 ist ebenfalls ein oszillierendes oder aperiodisches Element zweiter Ordnung. Die konkrete Art der Verknüpfung hängt vom Verhältnis der Zeitkonstanten ab T 1 und T 2 (oder bzw.), d.h. letztendlich durch die Mengen bestimmt M, G Und H. Das betrachtete mechanische System kann beispielsweise als Glied in einem Modell des Bremssystems eines Autos pro Rad verwendet werden (zusätzlich zum betrachteten Glied in einem solchen Modell muss die Masse des berücksichtigt werden). Auto und die Elastizität des Reifens).
Aus den betrachteten Beispielen wird deutlich, dass ihre mathematischen Modelle trotz der Unterschiede zwischen ACS-Geräten und ihren Zwecken die Form derselben Differentialgleichung zweiter Ordnung haben. Die in der Literatur betrachteten Arten von Links werden manchmal genannt Trägheitsverbindungen zweiter Ordnung .
Links integrieren
Ein ideales integrierendes Glied ist ein solches Glied, dessen Ausgangswert proportional zum Zeitintegral des Eingangswerts ist (vgl. Anwendung 1):

 ,
,
Wo k– statischer Umwandlungskoeffizient (Verstärkung) der idealen Integrationsverbindung, gleich dem Verhältnis der Änderungsrate des Ausgangswerts zum Eingangswert.
Die Linkübertragungsfunktion hat die Form:
 .
.
Die Übergangscharakteristik einer ideal integrierenden Verbindung hat die Form einer geneigten Geraden, da das Integral geometrisch die durch den Graphen der Schritteingangswirkung begrenzte Fläche darstellt X(T), die mit der Zeit zunimmt T. Die Lösung der Differentialgleichung des idealen Integrationsglieds hat die Form:
 ,
,
woher für einen Einheitsschritt ( X(T) = 1 at T³ 0) bei Null-Anfangsbedingungen j(0) = 0 erhalten wir ein linear ansteigendes Einschwingverhalten j(T) = k× T. In Abb. In Abb. 44 zeigt die Übergangseigenschaften idealer Integrationsglieder mit unterschiedlichen Werten k.
| Reis. 44 |
Das einfachste alltägliche Beispiel einer idealen integrierenden Verbindung ist eine Badewanne, in die Wasser gesaugt wird. Eingabeeinfluss X(T) für dieses Objekt ist der Zufluss (Durchfluss) von Wasser durch den Wasserhahn und der Ausgabewert j(T) – Wasserstand im Bad. Wenn Wasser eindringt, steigt der Pegel, d. h. Das System „akkumuliert“ (integriert) das Eingangssignal.
Beispiele für ideale Integrationsverbindungen sind ACS-Geräte wie Operationsverstärker, die im Integrationsmodus verwendet werden (Abb. 45– A) und hydraulischem Dämpfer (Abb. 45– B).
Die im Integrationsmodus verwendete Operationsverstärkergleichung lautet:
 ,
,
was der Gleichung des idealen Integrationsglieds entspricht, für die k = 1/R× C, Du bist dabei = X(T), Du bist raus = j(T).
| Reis. 45 |
| A) |
| B) |
Bei einem hydraulischen Dämpfer ist die Eingangswirkung eine Kraft F, wirkt auf den Kolben, und der Ausgangswert ist die Bewegung des Kolbens S. Da die Geschwindigkeit des Kolbens proportional zur ausgeübten Kraft ist:
,
Wo G– Widerstandskoeffizient (Dämpfungskoeffizient), dann ist die Bewegung des Kolbens proportional zum Integral der ausgeübten Kraft:
 .
.
Die resultierende Gleichung entspricht der Gleichung des idealen Integrationsglieds, für das k = 1/G, F(T) = X(T), S(T) = j(T).
Die betrachtete Art der integrierenden Links wird aufgerufen Ideal, Weil Seine Gleichung berücksichtigt nicht die Trägheit des durch den Link beschriebenen ACS-Geräts. In der Literatur kommt diese Art von Verknüpfung manchmal vor wird als astatisch bezeichnet Verknüpfung
Alle realen Geräte führen zu einer gewissen Verlangsamung des Betriebs, sodass ein genaueres Modell realer integrierender Geräte vorliegt Integrierende Verbindung mit Verzögerung
 ,
,
diese. ist das Produkt der Übertragungsfunktionen einer ideal integrierenden Verbindung und einer aperiodischen Verbindung erster Ordnung. Somit kann eine integrierende Verbindung mit Verzögerung durch eine Reihenschaltung dieser beiden Arten von Standardverbindungen dargestellt werden. Ein Motor kann durch eine solche Verknüpfung beschrieben werden, wenn man nicht die Winkelgeschwindigkeit als Ausgangsgröße betrachtet, sondern den Drehwinkel, der ein Integral der Winkelgeschwindigkeit ist, sowie den Dämpfer, wenn man seine Bewegungsgleichung genauer betrachtet .
Differenzierende Links
Ein idealer Differenzierer liefert einen Ausgangswert proportional zur Ableitung des Eingangssignals, d. h. Änderungsrate des Eingangseinflusses (vgl. Anwendung 1):
 ,
,
Wo k– statischer Umwandlungskoeffizient (Verstärkung) des idealen Differenzierungsglieds. Die Linkübertragungsfunktion hat die Form:  .
.
Das differenzierende Glied reagiert nicht auf eine Änderung der Eingangsgröße selbst, sondern auf eine Änderung ihrer Ableitung, also auf den Trend in der Entwicklung der Ereignisse. Daher sagen sie, dass das differenzierende Glied eine proaktive, prädiktiv Aktion. Mit seiner Hilfe können Sie die Reaktion der automatischen Steuerung auf sich ändernde Eingabeeinflüsse beschleunigen.
Analysieren wir die Form der Übergangscharakteristik eines idealen Differenzierungsgliedes (vgl. Anwendung 1). Wenn der Eingabe ein Einzelschritt-Link bereitgestellt wird X(T) = 0 für t< 0 и X(T) = 1 für t > 0. Die Ableitung einer konstanten Größe ist Null, daher ist j(T) = 0 für t< 0 и для t >0. Und nur im Moment der direkten Änderung des Eingangseinflusses von Null auf Eins, d.h. zum Zeitpunkt t = 0, Ableitung des Eingangssignals dx(T)/dt ungleich Null:
Dadurch hat das Einschwingverhalten eines idealen Differenziergliedes zum Zeitpunkt t = 0 theoretisch die Form eines Impulses mit unendlich großer Amplitude und verschwindend kleiner Dauer. Es ist klar, dass eine solche Übergangsreaktion mit einem echten ACS-Gerät nicht erreicht werden kann. Daher ist ein ideales Differenzierungsglied sowie solche Glieder erster und zweiter Ordnung (vgl. Anwendung 1) sind Vorbild und gehören dazu körperlich nicht realisierbar Links.
Als ideales differenzierendes Glied kann näherungsweise ein im Differenzierungsmodus eingeschalteter Operationsverstärker angesehen werden (Abb. 46– A) und ein Gleichstrom-Tachogenerator, wenn der Drehwinkel seines Rotors a( T) und als Ausgang – Ankerspannung U i(T) (Abb. 46– B).
Bei einem Gleichstrom-Tachogenerator mit konstantem Erregerfluss kann die Ankerspannung als proportional zur Drehwinkelgeschwindigkeit angesehen werden. Die Drehzahl wiederum ist die Ableitung des Drehwinkels:
 ,
,
was der Differentialgleichung eines idealen Differenzierungsgliedes mit statischem Umrechnungskoeffizienten entspricht k, j(T) = U i(T); X(T) = a( T).
In der Praxis führen differenzierende Geräte von selbstfahrenden Waffen zu einer gewissen Verlangsamung des Betriebs (sie haben Trägheit), sodass ein genaueres Modell realer Geräte vorliegt differenzierende Verbindung mit Verzögerung, deren Übertragungsfunktion die Form hat:
 ,
,
diese. ist das Produkt der Übertragungsfunktionen eines idealen differenzierenden Glieds und eines aperiodischen Glieds erster Ordnung. Somit kann eine differenzierende Verbindung mit einer Verlangsamung durch eine sequentielle Verbindung dieser beiden Arten von Standardverbindungen dargestellt werden. Beispiele für eine differenzierende Verbindung mit einer Verlangsamung sind ein Transformator, eine kapazitive differenzierende Schaltung (Abb. 47– A) und einer mechanischen Differenzierungseinrichtung, bestehend aus einer Feder und einem Dämpfer (Abb. 47– B).
| Reis. 47 |
| A) |
| B) |
Wir erhalten ein Modell der Dynamik eines kapazitiven Differenzierkreises (siehe Abb. 47– A). Schreiben wir die Gleichungen der Eingangs- und Ausgangskreise nach dem Kirchhoffschen Gesetz:
Differenzieren wir die Gleichung der Eingangsschaltung:
 ,
,
und lege einen Strom hinein ich(T), ausgedrückt durch die Ausgangsschaltungsgleichung:

Lassen Sie uns die Übertragungsfunktion des kapazitiven Differenzierkreises herleiten:

Erhalten W(P k = T = R× C.
Wir erhalten ein Modell der Dynamik eines mechanischen Differenziergeräts (siehe Abb. 47– B) Für j(T) = Es ist raus(T); X(T) = ist drin(T) unter der Annahme, dass die Elemente Reibung (Dämpfer) und Elastizität (Feder) keine Masse haben. Die Gleichung der Dämpferbewegung hat für diesen Fall die Form:
 ,
,
Wo G– Widerstandskoeffizient (Dämpfungskoeffizient). Für eine Feder mit Elastizitätskoeffizient H Die Bewegungsgleichung hat die Form:
 ,
,
daher nach der Substitution:

Lassen Sie uns die Übertragungsfunktion des mechanischen Differenziergeräts herleiten:

Erhalten W(P) entspricht der Übertragungsfunktion einer differenzierenden Verbindung mit Verzögerung, für die k = T = G/H.
Was ist ein dynamischer Link? In den vorherigen Lektionen haben wir uns einzelne Teile des automatischen Steuerungssystems angesehen und diese aufgerufen Elemente automatische Steuerungssysteme. Elemente können ein unterschiedliches Aussehen und Design haben. Die Hauptsache ist, dass solche Elemente mit einigen geliefert werden Eingangssignal x( T ) , und als Reaktion auf dieses Eingangssignal erzeugt das Steuersystemelement einige Ausgangssignal y( T ) . Wir haben außerdem festgestellt, dass die Beziehung zwischen den Ausgangs- und Eingangssignalen bestimmt wird durch dynamische Eigenschaften Steuerelemente, die als dargestellt werden können Übertragungsfunktion W(s). Also, Eine dynamische Verbindung ist jedes Element eines automatischen Steuerungssystems, das eine bestimmte mathematische Beschreibung hat, d. h. für die die Übertragungsfunktion bekannt ist.

Reis. 3.4. Element (a) und dynamische Verbindung (b) der selbstfahrenden Waffe.
Typische dynamische Links– Dies ist der minimal erforderliche Satz an Links, um ein Steuerungssystem jeglicher Art zu beschreiben. Typische Links sind:
proportionaler Link;
aperiodischer Link erster Ordnung;
aperiodischer Link zweiter Ordnung;
oszillierende Verbindung;
integrierender Link;
ideales differenzierendes Glied;
Zwangsglied 1. Ordnung;
Zwangsverbindung zweiter Ordnung;
Link mit reiner Verzögerung.
Proportionaler Link
Der Proportionallink wird auch genannt trägheitslos .
1. Übertragungsfunktion.
Die Übertragungsfunktion der Proportionalverbindung hat die Form:
W(S) = K wobei K der Gewinn ist.
Der proportionale Zusammenhang wird durch die algebraische Gleichung beschrieben:
y(T) = K· X(T)
Beispiele für solche Proportionalverbindungen sind ein Hebelmechanismus, ein starres mechanisches Getriebe, ein Getriebe, ein elektronischer Signalverstärker bei niedrigen Frequenzen, ein Spannungsteiler usw.



4. Übergangsfunktion .
Die Übergangsfunktion der Proportionalverbindung hat die Form:
h(t) = L -1 = L -1 = K· 1(t)
5. Gewichtsfunktion.
Die Gewichtungsfunktion der Proportionalverbindung ist gleich:
w(t) = L -1 = K·δ(t)




Reis. 3.5. Übergangsfunktion, Gewichtsfunktion, AFC und proportionaler Frequenzgang .
6. Frequenzeigenschaften .
Lassen Sie uns den AFC, AFC, PFC und LAC der proportionalen Verbindung ermitteln:
W Jω ) = K = K +0·J
A(ω
)
=
 = K
= K
φ(ω) = arctan(0/K) = 0
L(ω) = 20 lg = 20 lg(K)
Wie aus den präsentierten Ergebnissen hervorgeht, hängt die Amplitude des Ausgangssignals nicht von der Frequenz ab. In der Realität ist keine einzelne Verbindung in der Lage, alle Frequenzen von 0 bis ¥ gleichmäßig durchzulassen. Bei hohen Frequenzen wird die Verstärkung kleiner und geht gegen Null, wenn ω → ∞. Auf diese Weise, Das mathematische Modell der proportionalen Verbindung ist eine Idealisierung realer Verbindungen .
Aperiodischer Link ICH -te Ordnung
Aperiodische Links werden auch genannt Trägheit .
1. Übertragungsfunktion.
Die Übertragungsfunktion der aperiodischen Verbindung erster Ordnung hat die Form:
W(S) = K/(T· S + 1)
wobei K der Gewinn ist; T – Zeitkonstante, die die Trägheit des Systems charakterisiert, d. h. die Dauer des Übergangsprozesses darin. Weil das Die Zeitkonstante charakterisiert ein bestimmtes Zeitintervall , dann muss sein Wert immer positiv sein, d.h. (T > 0).
2. Mathematische Beschreibung des Links.
Eine aperiodische Verbindung erster Ordnung wird durch eine Differentialgleichung erster Ordnung beschrieben:
T· Dy(T)/ dt+ y(T) = K·X(T)
3. Physische Implementierung des Links.
Beispiele für eine aperiodische Verbindung erster Ordnung können sein: ein elektrischer RC-Filter; thermoelektrischer Wandler; Druckgastank usw.



4. Übergangsfunktion .
Die Übergangsfunktion der aperiodischen Verbindung erster Ordnung hat die Form:
h(t) = L -1 = L -1 = K – K e -t/T = K·(1 – e -t/T )


Reis. 3.6. Übergangscharakteristik einer aperiodischen Verbindung 1. Ordnung.
Der Übergangsprozess der aperiodischen Verbindung erster Ordnung hat eine exponentielle Form. Der stationäre Wert ist: h set = K. Die Tangente im Punkt t = 0 schneidet die Gerade des stationären Wertes im Punkt t = T. Zum Zeitpunkt t = T nimmt die Übergangsfunktion den Wert an: h(T) ≈ 0,632·K, d.h. Während der Zeit T erreicht die Übergangsreaktion nur etwa 63 % des stationären Wertes.
Definieren wir Regulierungszeit T bei für eine aperiodische Verbindung erster Ordnung. Wie aus der vorherigen Vorlesung bekannt ist, ist die Regelzeit die Zeit, nach der die Differenz zwischen aktuellem und eingeschwungenem Wert einen bestimmten vorgegebenen kleinen Wert Δ nicht überschreitet. (Normalerweise wird Δ auf 5 % des stationären Wertes eingestellt.)
h(T y) = (1 – Δ) h Mund = (1 – Δ) K = K (1 – e - T y/ T), daher e - T y/ T = Δ, dann T y / T = - ln(Δ), Als Ergebnis erhalten wir T y = [-ln(Δ)]·T.
Bei Δ = 0,05 T y = - ln(0,05) T ≈ 3 T.
Mit anderen Worten, die Zeit des Übergangsprozesses der aperiodischen Verbindung erster Ordnung ist ungefähr dreimal größer als die Zeitkonstante.
Man nennt algorithmische Verknüpfungen, die durch gewöhnliche Differentialgleichungen erster und zweiter Ordnung beschrieben werden typische dynamische Links .
Typische dynamische Verknüpfungen sind die Hauptbestandteile der algorithmischen Strukturen kontinuierlicher Steuerungssysteme; die Kenntnis ihrer Eigenschaften erleichtert die Analyse solcher Systeme erheblich.
Es ist zweckmäßig, die Klassifizierung durchzuführen, indem man verschiedene besondere Formen der Differentialgleichung berücksichtigt:
|
 2T 2 Statisch
2T 2 Statisch -sich durchsetzen
-sich durchsetzen -sich durchsetzen
-sich durchsetzenLinks mit einer 2  0 und 1
0 und 1  0 haben Statik, d.h. eindeutige Verbindung zwischen Ein- und Ausgabevariablen im statischen Modus. Links – statisch oder positionell.
0 haben Statik, d.h. eindeutige Verbindung zwischen Ein- und Ausgabevariablen im statischen Modus. Links – statisch oder positionell.
Links, die 2 der drei Koeffizienten a 2 haben  0 und 1
0 und 1  0 und 0
0 und 0  0, Trägheit haben (Verlangsamung).
0, Trägheit haben (Verlangsamung).
Die Links 1,5,7 haben nur 2 Koeffizienten  0. Sie sind die einfachsten oder elementarsten. Alle anderen typischen Verbindungen können aus elementaren Verbindungen durch serielle, parallele und antiparallele Verbindungen gebildet werden.
0. Sie sind die einfachsten oder elementarsten. Alle anderen typischen Verbindungen können aus elementaren Verbindungen durch serielle, parallele und antiparallele Verbindungen gebildet werden.
Aperiodischer Link
Die Dynamik des Prozesses wird durch die folgende Gleichung beschrieben:

Wo k - Übertragungskoeffizient oder Gewinn, T Zeitkonstante, die die Trägheit der Verbindung charakterisiert.
1 . Schrittantwort:
. Schrittantwort:

1)

2) Konstruieren Sie am Nullpunkt eine Tangente an die Übergangscharakteristik und bestimmen Sie den Schnittpunkt mit der Geraden k. Die Abszisse dieses Punktes ist die Zeitkonstante.
2. Die Impulsantwort oder Gewichtsfunktion einer Verbindung kann durch Differenzieren der Funktion ermittelt werden H(T) :


3. Übertragungsfunktion:
P


Das Blockdiagramm des Links sieht folgendermaßen aus:
Einsetzen in die Übertragungsfunktion P= J erhalten wir die Amplitude-Phase-Frequenz-Funktion:


5 . Frequenzgang:
. Frequenzgang:
Das Frequenzgangdiagramm ist punktweise dargestellt:


Hier Mit– Kopplungsfrequenz.
Niederfrequente harmonische Signale ( < Mit) werden gut durch die Verbindung geleitet – wobei das Verhältnis der Amplituden der Ausgangs- und Eingangswerte nahe am Übertragungskoeffizienten liegt k. Hochfrequenzsignale ( > Mit) werden von der Verbindung schlecht übertragen: Das Amplitudenverhältnis ist von Bedeutung< коэффициента k. Je größer die Zeitkonstante T, d.h. Je größer die Trägheit der Verbindung ist, desto weniger bzw. desto stärker wird der Frequenzgang entlang der Frequenzachse verlängert bei gleiche Frequenzbandbreite.
Das. Trägheitsglied erster Ordnung in seinen Frequenzeigenschaften ist Tiefpassfilter .
Die Phasenantwort der Trägheitsverbindung erster Ordnung ist gleich:



Je höher die Frequenz des Eingangssignals ist, desto größer ist die Phasenverzögerung des Ausgangswerts gegenüber dem Eingangswert. Die maximal mögliche Verzögerung beträgt 90 0 . Bei der Frequenz Mit = 1/T die Phasenverschiebung beträgt –45 0.
Betrachten wir nun den LACCH des Links. Der genaue LFC wird durch den Ausdruck beschrieben:
Bei der Konstruktion des LFC einer aperiodischen Verbindung greifen sie auf asymptotische Methoden zurück oder erstellen mit anderen Worten einen asymptotischen Graphen des LFC.

Der Wert der konjugierten Frequenz w c, bei dem sich beide Asymptoten schneiden, wird aus der Bedingung ermittelt


Sehen wir uns an, was passiert, wenn kein asymptotischer, sondern ein exakter LFC erstellt wird:


Die exakte Charakteristik (LAFC) am Schnittpunkt wird um den Betrag kleiner sein als die asymptotische LFC  .
.
Es liegt eine sogenannte instabile aperiodische Verbindung vor

Oszillatorische Verbindung
Die Dynamik von Prozessen in der Schwingungsverbindung wird durch die Gleichung beschrieben:
 ,
,
Wo k Verbindungsgewinn; T Zeitkonstante der Schwingungsverbindung;  Verbindungsdämpfungskoeffizient (oder Dämpfungskoeffizient).
Verbindungsdämpfungskoeffizient (oder Dämpfungskoeffizient).
Abhängig vom Wert des Dämpfungskoeffizienten werden vier Arten von Verbindungen unterschieden:
a) Schwingung 0< <1;
<1;
b) aperiodische Verbindung zweiter Ordnung  >1;
>1;
c) konservativer Link  =0;
=0;
d) instabile Schwingungsverbindung  <0.
<0.
1. Übergangscharakteristik der Schwingverbindung:


A

 , oder es kann durch Bestimmung der Zeitkonstante des Exponentials ermittelt werden, mit dem die Dämpfung auftritt
, oder es kann durch Bestimmung der Zeitkonstante des Exponentials ermittelt werden, mit dem die Dämpfung auftritt 
Je näher der Dämpfungskoeffizient bei Eins liegt, desto kleiner ist die Amplitude der Schwingungen T, desto schneller stellen sich transiente Prozesse ein.


Bei >1 oszillierende Verbindung wird aufgerufen aperiodischer Link zweiter Ordnung (Reihenschaltung zweier aperiodischer Verbindungen mit Zeitkonstanten T 1 Und T 2 ).
 , oder Sie können es so schreiben
, oder Sie können es so schreiben  .
.
Hier
0
– der Kehrwert der Zeitkonstante (  );
);
 .
.
Ein solcher Link wird in der Literatur genannt konservativer Link .


Alle Übergangseigenschaften schwanken entlang des Wertes k.
2. Impuls-Transientenantwort:






3



Das AFC-Diagramm sieht folgendermaßen aus: 
Dies ist ein Merkmal für eine oszillierende Verbindung und für eine aperiodische Verbindung zweiter Ordnung.
Für einen aperiodischen Link -  .
.

 -
-
AFFC für den konservativen Link.
 .
.
A

 hat ein Maximum (Resonanzspitze) gleich
hat ein Maximum (Resonanzspitze) gleich
Daraus ist ersichtlich, dass der Koeffizient umso kleiner ist , desto größer ist die Resonanzspitze.

T



Für den Anlass B) Das Diagramm wird ähnlich sein, nur die Krümmung wird etwas kleiner sein (gestrichelte Linie im Diagramm).


Wo 
Asymptotischer LFC der oszillierenden Verbindung:

Im zweiten Abschnitt ermitteln wir die Steigung:
Vorlage für den Zeitplan A) wird von 0 bis 1 in Schritten von 0,1 angegeben.
ZU



Das Blockschaltbild der Schwingverbindung sieht folgendermaßen aus:


Ein Beispiel für eine oszillierende Verbindung ist eine beliebige RLC-Schaltung.
Allgemeine Eigenschaften statischer Links
Im stationären Zustand steht die Ausgangsvariable y durch die statische Gleichung in eindeutiger Beziehung zur Eingangsvariablen x

Der Verbindungsübertragungskoeffizient hängt durch die Beziehung mit der Übertragungsfunktion zusammen


Bei den Verbindungen handelt es sich um niederfrequente Verbindungen (mit Ausnahme der trägheitslosen), d. h. Sie übertragen niederfrequente Signale gut und übertragen hochfrequente Signale schlecht; im Modus harmonischer Schwingungen erzeugen sie negative Phasenverschiebungen.
VORTRAG 3.
Frequenzeigenschaften.
Frequenzcharakteristiken beschreiben stationäre erzwungene Schwingungen am Ausgang einer Verbindung, die durch harmonische Einflüsse am Eingang verursacht werden. Betrachten wir diesen Modus.
Auf den Eingang des Links soll ein harmonischer Einfluss ausgeübt werden (Abb. 2.6a)
Wo xmax ist die Amplitude und ω ist die Kreisfrequenz dieses Effekts.
Am Ende des Übergangsprozesses liegen am Ausgang der Verbindung harmonische Schwingungen vor, die dieselbe Frequenz wie die Eingangsschwingungen haben, sich jedoch im Allgemeinen in Amplitude und Phase unterscheiden. Diese. im eingeschwungenen Zustand der Ausgangswert der Verbindung
![]() ,
,
Wo ymax– Amplitude der stationären Ausgangsschwingungen.
Bei einer festen Amplitude der Eingangsschwingungen hängen Amplitude und Phase der stationären Schwingungen am Ausgang der Verbindung von der Schwingungsfrequenz ab. Wenn Sie die Schwingungsfrequenz schrittweise von Null aus erhöhen und die stationären Werte der Amplitude und Phase der Ausgangsschwingungen für verschiedene Frequenzen bestimmen, können Sie eine Frequenzabhängigkeit des Amplitudenverhältnisses erhalten A = y max / x max und Phasenverschiebung φ Ausgangs- und Eingangsschwingungen.

Diese Abhängigkeiten werden jeweils aufgerufen A(ω) – Amplitudenfrequenzgang (AFC) Und φ(ω) – Phasenfrequenzgang (PFC). Eine ungefähre Darstellung dieser Eigenschaften für herkömmliche Trägheitsverbindungen ist in Abb. 3.1, a und b dargestellt. Wie in diesen Abbildungen gezeigt, fällt bei solchen Verbindungen aufgrund ihrer Trägheit der Amplitudenfrequenzgang mit zunehmender Frequenz schließlich auf Null. Darüber hinaus gilt: Je weniger träge die Verbindung ist, desto länger ist ihr Amplitudenfrequenzgang, d. h. Je größer das Frequenzband, das von der Verbindung übertragen wird, oder einfach dessen Bandbreite.
Theoretisch verläuft der Frequenzgang bis ins Unendliche, in der Praxis wird die Bandbreite jedoch anhand des Frequenzwerts abgeschätzt, bei dem das Amplitudenverhältnis liegt A= 0,707 und ändert sich bei weiterer Erhöhung der Frequenz nicht (es wird angenommen, dass das Steuersystemelement im Bereich von –ω P bis +ω P das harmonische Signal ohne merkliche Dämpfung durchlässt). Durchlassbereich Δω П = 2ω П Das Vorhandensein eines Maximums im Frequenzgang zeigt die Resonanzeigenschaften der Verbindung an. Die Frequenz, die der maximalen Amplitudenkennlinie entspricht, wird aufgerufen resonant(ω ð) . Die Frequenz, bei der die Verstärkung des Eingangssignals gleich eins ist, wird aufgerufen Grenzfrequenzω s.
Der Phasenfrequenzgang zeigt die durch ein Steuerelement bei verschiedenen Frequenzen verursachten Phasenverschiebungen. Für gewöhnliche Trägheitsverbindungen, wie in Abb. 3.1, b, mit positivem ω ist der Phasengang immer negativ ( φ < 0), т.е. выходные колебания отстают по фазе от входных, и это отставание растет с частотой.
Gewöhnliche Amplituden- und Phasenfrequenzeigenschaften können mithilfe von zu einer Eigenschaft kombiniert werden – dem Amplituden-Phasen-Frequenzgang (APFC). A(ω) Und φ(ω) als Polarkoordinaten (Abb. 3.2). Es ist auf der komplexen Ebene konstruiert. Jeder Punkt des Phasenfrequenzgangs entspricht einem bestimmten Frequenzwert ω. Die Menge aller Punkte, wenn sich die Frequenz von Null auf Unendlich ändert, ist eine durchgehende Linie (Hodograph genannt), entsprechend der Frequenzübertragungsfunktion W(Jω). Die Werte von ω für eine endliche Anzahl charakteristischer Punkte werden entlang der Kennlinie aufgetragen, wie in Abb. 3.2 dargestellt. Mit dem AFC können Sie aus diesen Punkten Merkmale erstellen A(ω) Und φ(ω) .

Die AFC-Antwort ist sowohl für positive als auch für negative Frequenzen ausgelegt. Beim Ersetzen in W(Jω) ω An - ω Man erhält die konjugierte Komplexmenge. Daher ist die AFC-Reaktion für negative Frequenzen ein Spiegelbild der AFC-Reaktion für positive Frequenzen relativ zur realen Achse. In Abb. 3.2 Die AFC-Reaktion für negative Frequenzen wird mit einer gepunkteten Linie dargestellt.
Der AFC kann auch in einem rechtwinkligen Koordinatensystem konstruiert werden – in der komplexen Ebene. In diesem Fall sind die Koordinaten die in Abb. 3.2 gezeigten Projektionen U Und V Vektor A auf den entsprechenden Achsen. Abhängigkeiten U(ω) Und V(ω) heißen entsprechend echt (echt) Und imaginäre Frequenzeigenschaften.
Der Kürze halber werden wir in Zukunft das Wort „Frequenz“ in den Namen verschiedener Frequenzcharakteristika weglassen und einfach von der Amplitudencharakteristik und der Phasencharakteristik sprechen.
Bei der Untersuchung von ACS ist es zweckmäßig, die Amplituden- und Phasenfrequenzeigenschaften zu konstruieren logarithmische Koordinaten .

Dies ist auf zwei Umstände zurückzuführen. Erstens In logarithmischen Koordinaten werden die Kennlinien so verformt, dass es in den allermeisten praktischen Fällen möglich wird, die Amplitudenfrequenzkennlinien vereinfacht als gestrichelte Linien darzustellen.
Zweite Bequemlichkeit ist mit der Konstruktion des Frequenzgangs einer Kette in Reihe geschalteter Glieder verbunden, d.h. Im logarithmischen Maßstab ist der Frequenzgang einer Gliederkette gleich der Summe der Amplitudencharakteristiken einzelner Glieder.
Der Frequenzgang in logarithmischen Koordinaten (Abb. 3.3) ist als Abhängigkeit 20lg aufgetragen A aus log ω heißt logarithmische Amplitudenkennlinie (LAC), und die Phase eins – in Form einer Abhängigkeit von φ von log ω, heißt logarithmische Phasencharakteristik (LPC).
Größe 20 lg A bezeichnet durch L. Es wird die Einheit dieser Menge verwendet Dezibel, gleich einem Zehntel Bel. Bel ist die Einheit des dezimalen Logarithmus der Signalleistungsverstärkung, d.h. 1 Bel entspricht einer Leistungsverstärkung um das 10-fache, 2 Bel – das 100-fache, 3 Bel – das 1000-fache usw. Weil die Signalleistung ist proportional zum Quadrat der Amplitude und lg A 2 = 2 lg A, dann die Verstärkung in Bel, ausgedrückt durch das Amplitudenverhältnis A, entspricht 2 log A. Dementsprechend entspricht es in Dezibel 20 LG A. In diesem Fall bestehen folgende Beziehungen zwischen den Werten A Und L:
| A | 0.001 | 0.01 | 0.1 | 0.316 | 0.89 | 1.12 | 3.16 | ||||
| L,dB | -60 | -40 | -20 | -10 | -1 |
Bei Verwendung von LAC wird der logarithmische Phasenverlauf in halblogarithmischen Koordinaten konstruiert, d. h. in Form einer Abhängigkeit von φ von log ω, so dass beide Eigenschaften durch eine Skala auf der Abszissenachse in Beziehung stehen. Die Verwendung einer logarithmischen Skala auf der Ordinatenachse des Phasenverlaufs ist nicht sinnvoll, weil Die Phasenverschiebung einer Gliederkette ergibt sich bereits einfach aus der Summe der Phasenverschiebungen ihrer einzelnen Glieder.
Die Abszissenachse gibt entweder die direkten Werte von log ω oder, was praktisch praktischer ist, die Werte der Frequenz ω selbst an. Im ersten Fall ist die Inkrementeinheit von log ω eine Dekade, was einer Frequenzänderung um den Faktor 10 entspricht. Die x-Achse ist ebenfalls in Oktaven unterteilt. Eine Oktave entspricht einer Verdoppelung der Frequenz. (Eine Oktave entspricht 0,303 Dekaden, da log 2 = 0,303).
Beachten Sie auch, dass, da Bei Verwendung einer logarithmischen Skala liegt der Punkt, der ω=0 entspricht, links im Unendlichen. Logarithmische Eigenschaften werden nicht aus der Nullfrequenz erstellt, sondern aus einem ausreichend kleinen, aber endlichen Wert von ω, der am Schnittpunkt von aufgetragen wird die Koordinatenachsen. Der Schnittpunkt des LAX mit der Abszissenachse entspricht der Grenzfrequenz ω s. Die obere Halbebene des LAC entspricht den Werten von A>1 (Amplitudenverstärkung) und die untere Halbebene den Werten von A<1 (ослабление амплитуды).
Aus der Übertragungsfunktion lassen sich leicht analytische Ausdrücke für die oben diskutierten Frequenzeigenschaften erhalten. Wenn im Ausdruck der Linkübertragungsfunktion W(s) Ersatz s = jω, dann erhalten wir eine komplexe Größe W(jω), was eine Funktion ist ω und ist die Amplituden-Phasen-Frequenz (oder einfach Frequenz) der Verbindung. Sein Modul ist der Amplitudenfrequenzgang A(ω), und das Argument ist der Phasenfrequenzgang φ(ω) .
![]() (3.1)
(3.1)
Formel (3.1) bestimmt die gewünschte Beziehung der Übertragungsfunktion zu den oben angegebenen Frequenzeigenschaften der Verbindung: Modul der Frequenzfunktion W(jω) Es gibt A(ω), und das Argument ist φ(ω) .
Wenn Sie sich das vorstellen W(jω) nicht in exponentieller, sondern in algebraischer Form, d.h.
dann hier U(ω) Und V(ω) werden die zuvor eingeführten realen und imaginären Frequenzcharakteristiken sein, die die Koordinaten der Amplituden-Phasen-Charakteristik in der komplexen Ebene sind.
Gemäß (3.1) und (3.2) ist der Zusammenhang zwischen den oben genannten Frequenzeigenschaften wie folgt:

Das Verfahren zum Erhalten des Ausdrucks für die oben genannten Frequenzeigenschaften aus der Link-Transfer-Funktion ist einfach. Nachdem wir die Übertragungsfunktion in den Ausdruck eingesetzt haben, erhalten wir:
![]() ,
,
wo durch Indizes R Und Q Die Teile der entsprechenden komplexen Größen im Zähler und Nenner sind markiert.
Nachdem wir uns vom Imaginären im Nenner befreit haben, haben wir endlich:

Typische dynamische Verbindungen automatischer Steuerungssysteme
Was ist ein dynamischer Link? In den vorherigen Lektionen haben wir uns einzelne Teile des automatischen Steuerungssystems angesehen und diese aufgerufen Elemente automatische Steuerungssysteme. Elemente können ein unterschiedliches Aussehen und Design haben. Die Hauptsache ist, dass solche Elemente mit einigen geliefert werden Eingangssignal x(t) , und als Reaktion auf dieses Eingangssignal erzeugt das Steuersystemelement einige Ausgangssignal y(t) . Wir haben außerdem festgestellt, dass die Beziehung zwischen den Ausgangs- und Eingangssignalen bestimmt wird durch dynamische Eigenschaften Steuerelemente, die als dargestellt werden können Übertragungsfunktion W(s). Also, Eine dynamische Verbindung ist jedes Element eines automatischen Steuerungssystems, das eine bestimmte mathematische Beschreibung hat, d. h. für die die Übertragungsfunktion bekannt ist.


Reis. 3.4. Element (a) und dynamische Verbindung (b) der selbstfahrenden Waffe.
Typische dynamische Links– Dies ist der minimal erforderliche Satz an Links, um ein Steuerungssystem jeglicher Art zu beschreiben. Typische Links sind:
§ proportionaler Link;
§ aperiodischer Link erster Ordnung;
§ aperiodischer Link zweiter Ordnung;
§ oszillierende Verbindung;
§ integrierender Link;
§ ideales differenzierendes Glied;
§ erzwingender Link erster Ordnung;
§ Zwangsverbindung zweiter Ordnung;
§ Link mit reiner Verzögerung.
Proportionaler Link
Der Proportionallink wird auch genannt trägheitslos .
Übertragungsfunktion.
Die Übertragungsfunktion der Proportionalverbindung hat die Form:
W(s) = K wobei K der Gewinn ist.
Verwandte Informationen.
Die Übertragungsfunktion einer Verbindung ist im allgemeinen Fall das Verhältnis zweier Polynome:
Ein Polynom beliebiger Ordnung kann in Primfaktoren zerlegt werden k 1 P; (D 1 P+ D 2 ); (D 1 P 2 + D 2 P+ D 3 ), daher kann die Übertragungsfunktion als Produkt einfacher Faktoren oder einfacher Brüche der Form dargestellt werden:
 ;
;
 ;
; .
.
Verknüpfungen, deren Übertragungsfunktionen die Form einfacher Faktoren oder einfacher Brüche haben, werden aufgerufen typisch oder elementar Links. Elementarfaktoren, bei denen es sich um Polynome erster und zweiter Ordnung handelt, werden in die in der Theorie der automatischen Steuerung übernommene Standardform transformiert:
 ;
;
 ,
,
k (k 0) - Transmissionskoeffizient,
T (T 0) - Zeitkonstante(hat die Dimension einer Zeiteinheit),
- Dämpfungskoeffizient.
Die Haupttypen von Links sind unterteilt in: positionelle, differenzierende und integrierende.
Positionsbezogen HVenyami nennt man solche Verknüpfungen, in deren Übertragungsfunktion sich die Polynome befinden M(P) Und N(R) haben kostenlose Mitglieder.
U differenzieren Links es gibt keinen freien Term im Zähler der Übertragungsfunktion, d.h. Für einzelne differenzierende Verbindungen hat die Übertragungsfunktion die Form:
 , Wo M 1
(P) - Freies Mitglied.
, Wo M 1
(P) - Freies Mitglied.
U integrierend Links In der Übertragungsfunktion gibt es keinen freien Nennerterm, d. h.:
 .
.
1. Aperiodischer Link
.
Standardform zum Schreiben der Link-Gleichung: 
A
A)
B) Abbildung 13. Implementierungsschemata aperiodischer Link
In Operatorform sind der Spannungs- und Stromausgang für die Schaltung ( Reis. 13,A ) sind jeweils gleich:
 Und
Und 
 .
.
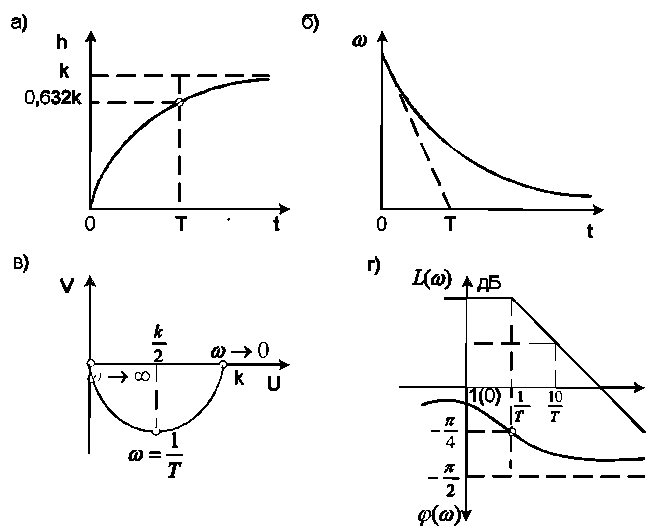
Abbildung 14. Eigenschaften
aperiodischer Link erster Ordnung
Übertragungsfunktion Aperiodischer Link:
Allgemein Übertragungsfunktion Der aperiodische Link hat die Form:
 Wo: k
= 1, T
= R.C..
Wo: k
= 1, T
= R.C..
Übergangsfunktion aperiodischer Link ( Reis. 14,a):
 .
.
Gewichtsfunktion aperiodischer Link ( Reis. 14, geb):
Wenn die Eigenschaften dieser Funktionen experimentell ermittelt werden, können sie zur Bestimmung der Werte verwendet werden T Und k und erhalten Sie die Verbindungsgleichung. Hinter Dauer des Übergangsprozesses Nehmen Sie die Zeit, in der der Ausgangswert 95 % seines Endwerts erreicht.
Amplituden-Phasen-Frequenzgang(AFFC) der aperiodischen Verbindung ( Reis. 14,V):
Wo:  ,
, .
.
Dieses Merkmal ist ein Halbkreis mit einem Radius k/2 und Mittelpunkt mit Koordinaten ( k/2; J= 0) auf der reellen Achse.
Amplitudenfrequenz(AFC) der aperiodischen Verbindung:
Phasenfrequenzgang(PFC) der aperiodischen Verbindung:
Logarithmischer Amplitudenfrequenzgang(LAFC) der aperiodischen Verbindung ( Reis. 14,g):
Ungefähr kann der LFC durch zwei Asymptoten ersetzt werden, zu denen er wann tendiert → 0 und → . Der ungefähre LFC wird aufgerufen asymptotisch .

Beide Asymptoten schneiden sich im entsprechenden Punkt = 1/T. Diese Frequenz wird aufgerufen konjugieren.
Zum Phasenfrequenzgang (PFC) bei → Wert φ variiert von 0 bis minus π/2.
2. Oszillatorische Verbindung
.
Die Gleichung der oszillierenden Verbindung hat die Form:  .
.
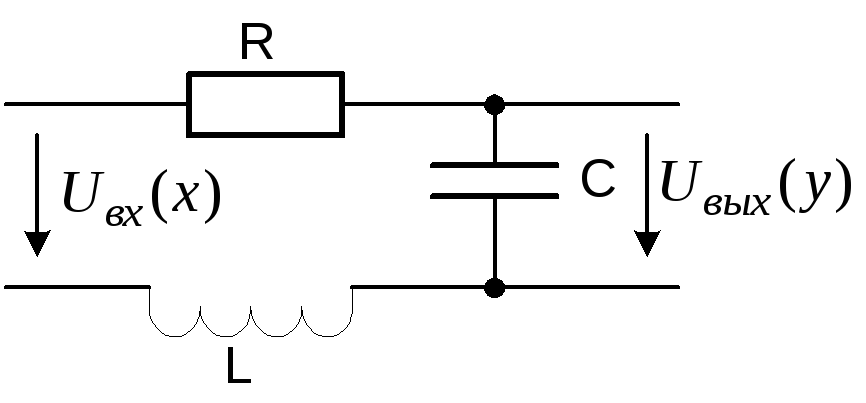 Abbildung 15. Implementierungsdiagramm
Abbildung 15. Implementierungsdiagramm
oszillierende Verbindung
Es handelt sich um eine serielle Verbindung RLC Elemente ( Reis. 15).
In Operatorform beträgt die Spannung am Ausgang der Schwingverbindung:
 , Wo:
, Wo:  ,
, .
.
Es ist üblich zu bezeichnen T 0 = T,T 1 = 2ξT, Dann Übertragungsfunktion die oszillierende Verbindung hat die Form:
Koeffizient ξ (zeta) heißt Koeffizient Dämpfung(Dämpfung). Wenn 0< ξ < 1, звено называется oszillierend; Wenn ξ = 0 (T 1 = 0) wird der Link aufgerufen konservativ, Wenn ξ ≥ 1 - aperiodische Verbindung der Sekunde Befehl.
A
Abbildung 16. Eigenschaften oszillierende Verbindung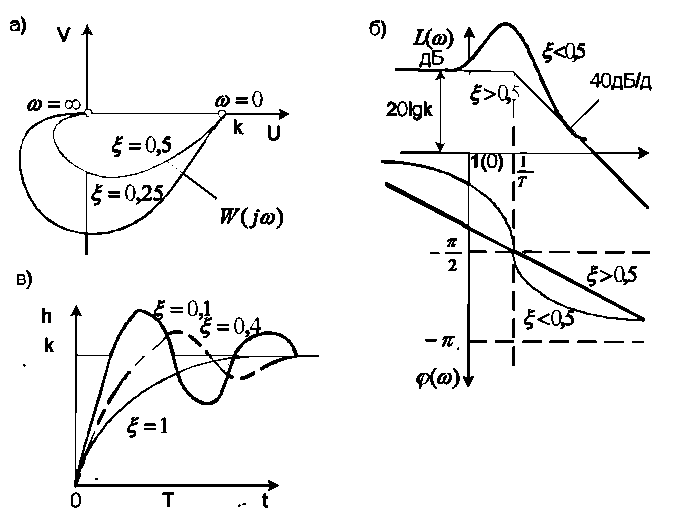
Allgemein Amplituden-Phasen-Frequenzgang Links ( Reis. 16,a):
Wo k = 1.
Wenn wir Zähler und Nenner mit dem komplex konjugierten Ausdruck des Nenners multiplizieren, erhalten wir:
Daher die realen und imaginären Frequenzeigenschaften der Schwingungsverbindung:
 Und
Und 
Amplitudenfrequenzgang Schwingverbindung (AFC):
Logarithmischer Amplituden-Frequenzgang(LACHH) der oszillierenden Verbindung:
Bei niedrigen Frequenzen ω<1/Т
= ω
Mit im Ausdruck  kann vernachlässigt werden T 2
ω
2
und bei Frequenzwerten ω>1/T im Ausdruck
kann vernachlässigt werden T 2
ω
2
und bei Frequenzwerten ω>1/T im Ausdruck  wir können die Einheit vernachlässigen und den Begriff ( 2ξТω) 2 . Dann die Gleichung asymptotischer LFC oszillatorischer Link kann geschrieben werden:
wir können die Einheit vernachlässigen und den Begriff ( 2ξТω) 2 . Dann die Gleichung asymptotischer LFC oszillatorischer Link kann geschrieben werden:

Asymptotischer LFC ( Reis. 16, geb) bei ω<1/Т = ω Mit (ω Mit- konjugierte Frequenz) parallel zur Frequenzachse ist und wann ω ≥ 1/T hat eine Steigung von minus 40 dB/Dekade. Bei Werten von 0,5<ξ<1 характеристика близка к ломанной линии, если ξ<0,5, то получается заметный «горб», который уходит в бесконечность при ξ → 0. Роль постоянных времени T 0 Und T 1 In der Gleichung der oszillierenden Verbindung gilt Folgendes: konstant T 0 - „schwingende“ Vibrationen und T 1 - dämpft sie.
Phasenfrequenzgang(FCHH) ( Reis. 16, geb) variiert monoton im Bereich von 0 bis - :
Übergangsfunktion der oszillierenden Verbindung (Reis. 16,V) bei Null-Anfangsbedingungen:
 ,
,
Wo:  ;
; ;
; .
.
Bei  Das Einschwingverhalten ist ein Diagramm harmonischer Schwingungen.
Das Einschwingverhalten ist ein Diagramm harmonischer Schwingungen.
Gewichtsfunktion des Schwingglieds:




